
Leonardo: un entrenador de marcha infantil de madera
Cómo simplifiqué la tecnología médica en Sudáfrica para crear un entrenador de marcha de madera. Diseño humanitario e innovación de bajo costo.

En todo el mundo, unas 17 millones de personas conviven con parálisis cerebral. La tremenda neuroplasticidad del cerebro de los chicos nos da una ventana clave hasta los ocho años para que aprendan a caminar. Las tecnologías de asistencia de los países desarrollados suelen ser inalcanzables para las familias del Sur Global, son difíciles de arreglar y no sirven para andar por terrenos desparejos. Ahí es donde entra mi diseño: el entrenador de marcha "Leonardo" viene a acortar esa brecha enorme entre la costosa tecnología médica del primer mundo y la cruda realidad de las regiones en desarrollo.
Te soy sincero, al principio estaba medio indeciso sobre si armar este proyecto como una postulación o un artículo. No soy diseñador recibido ni periodista de manual, che. En realidad soy informático y cirujano ortopedista, pero tengo una pasión total por el diseño funcional. Cuando un amigo que es diseñador de productos vio las fotos y los videos de mi "carrito de madera" loco, me dijo al toque que tenía que documentar y compartir este proyecto sí o sí. Por eso, ahora te voy a contar todo bien al detalle. Capaz que el texto me quedó un poco largo, pero es que hace falta para poder contarte las cosas tal cual las viví. Si lo leés entero, me hacés un re favor, y si no, no pasa nada, pegale una de tus miradas a las fotos.
El origen: de India a Sudáfrica
La historia de este proyecto arrancó hace unos años, cuando un gran amigo mío se fue a hacer un voluntariado a una organización en Sudáfrica. Hacía ortesis para chicos de bajos recursos. Lo triste es que allá casi nadie sabe cómo fabricar bien una ortesis, por lo que su ayuda y el hecho de transmitir su conocimiento eran recontra necesarios. Me contaba de lo hermoso que es el país, de las playas de ensueño, los delfines y de que Jeffreys Bay es, además, uno de los mejores lugares del mundo (si no el mejor) para surfear.
Yo ya había laburado en el extranjero con mi trabajo de cirujano ortopedista. En India, de donde viajé desde Appenzell a Varanasi para hacer mi servicio civil en una misión en el extranjero, fabriqué prótesis para chicos y ahí viví en carne propia las dificultades que tiene la gente humilde para salir adelante. Nadie tiene el conocimiento para armar un buen elemento de asistencia. Lo poco que hay es re difícil o imposible de importar. Y si lográs importarlo, de todas formas es incomprable para la gran mayoría. Muchas veces, estos aparatos ni siquiera están pensados para las condiciones del lugar. Ahí empiezan a pesar cosas re distintas, como que duren un montón, que cuesten dos mangos, que sirvan para andar en terrenos desparejos (viste que allá no está todo perfectamente asfaltado ni adaptado para sillas de ruedas), y que se puedan mantener y arreglar sin necesidad de técnicos especializados.

En Suiza y en los países desarrollados pasa todo lo contrario: la plata no es problema, necesitás personal capacitado que te calibre el aparato cada dos semanas (por ejemplo, si el chico crece), vos mismo no lo podés arreglar casi nunca, no te podés mover por caminos de tierra y, encima, el bipedestador solo lo conseguís en unos pocos países.
La antítesis: investigación de alta tecnología versus utilidad en el día a día
Cuando se me cruzó la idea de irme a Sudáfrica, estaba laburando en la Universidad de Ciencias Aplicadas en Rapperswil. Ahí estábamos desarrollando justamente uno de esos aparatos de altísima tecnología: un robot re complejo para que las personas con parálisis puedan caminar. Y ojo, solo caminaba en línea recta, con la batería llena, con dos personas cuidándolo al lado por si se caía, y en espacios cerrados con piso liso y sin ningún obstáculo. Como te imaginarás, de práctico para la vida diaria no tenía nada. Pero bueno, así es la investigación científica y me parece re importante. Es justamente ahí donde nacen los productos del futuro. Uno se anima a pensar de otra forma y hace que lo imposible se vuelva real y tangible. Para cada problema siempre hay una solución, tarde o temprano. O casi siempre, al menos.


Como soy informático recibido, me tocó escribir el software para el exoesqueleto. Pero también aprendí muchísimo y sumé una experiencia tremenda en diseño de producto: cómo estructurar la fabricación de un producto médico, cómo diseñar sistemas electrónicos, cómo hacer pruebas de manera segura y evaluar los riesgos. Y por sobre todas las cosas: cómo tomarse el tiempo para lograr un buen diseño y un concepto sólido, registrando las ideas de manera sistemática, evaluándolas y decidiéndose al final por las mejores opciones.
El público objetivo y la necesidad médica
Así que un día lo llamé a Daniel a Sudáfrica. Nos pusimos a tirar ideas sobre qué tipo de producto podía desarrollar para su fundación, "Timion". Se caía de maduro que podíamos hacer una especie de exoesqueleto de bajo costo para ayudar a dar sus primeros pasos a quienes no pueden caminar de forma independiente. Decidimos enfocar el público objetivo en chicos con parálisis cerebral (PC).
Porque de esos hay muchísimos allá y en todo el mundo (unas 17 millones de personas a nivel global) y en Sudáfrica la tasa es súper alta. Con esta patología, el bebé sufre una falta de oxígeno en el cerebro al nacer, lo que hace que mueran áreas cerebrales enteras. En algunas personas los síntomas son re leves, capaz que hablás con ellos y ni te das cuenta. Varía un montón según el daño. Pero si te toca la mala, el chico no puede caminar bien, tiene parálisis, espasticidad y dificultades enormes para aprender a caminar durante su infancia. La mayoría de estos chicos termina pasando toda su vida en silla de ruedas.
Pero hay una luz de esperanza re importante. ¡Algo clave que mucha gente no sabe!
Resulta que el cerebro de los chicos tiene una plasticidad neuronal tremenda. Esto significa que las conexiones cerebrales se pueden reestructurar, adaptar y aprender cosas que de adulto ya te costaría una enormidad o sería directamente imposible. Y caminar entra en ese combo. Si hacés entrenamientos diarios y fisioterapia constante con tu hijo, las chances de que aprenda a caminar gracias a estas nuevas conexiones neuronales son altísimas, permitiéndole pasar el resto de su vida parado en lugar de estar postrado en una silla.
Pero como te decía, ¡para eso el entrenamiento diario es vital! Específicamente todos los días, y idealmente hasta los 8 años. Después de esa edad, la plasticidad del cerebro empieza a decaer y el sueño de vivir sin la silla se va alejando hasta volverse imposible. Lo lindo es que se puede lograr. Pero cualquiera que tenga hijos sabe que a partir de cierta edad y peso, sostener a un chico de la cadera durante horas es una tortura para la espalda. Más todavía estando tan agachado.
Por eso acá en Europa tenemos un montón de aparatos para esto: estructuras complicadas con ruedas donde lo sujetás al chico (después de que un profesional te lo dejó a punto), andadores de distintos tamaños o robots como el Lokomat, que sirven para entrenar de forma repetitiva el movimiento de cadera, rodillas y tobillos. Todo de primer nivel y re efectivo para aprender a caminar. Muchas veces se usan combinados. Hay familias que para un solo chico tienen tres o más aparatos para la terapia, y las obras sociales les dan otros nuevos a medida que el nene crece. Buenísimo, sí, pero incomprable y nada amigable para la gente con menos recursos de este mundo, ya sea en India o en Sudáfrica.



La visión: un robot de madera todoterreno que hace de todo
Entonces nos propusimos desarrollar un entrenador de marcha que solucionara todo de una: que ofreciera un entrenamiento repetitivo como un robot, que se fuera adaptando a medida que el chico crece, que sirviera tanto para los que ya caminan bastante bien como para los que casi no pueden mover o apoyar las piernas por su cuenta. Tenía que ser re fácil de usar y regular, sin necesidad de un especialista al lado. Y además, debía incluir funciones directas para corregir posturas típicas de la PC, como el cruce de piernas (marcha en tijera), la falta de extensión de rodillas (marcha agachada o crouch gait) o el pie equino.
Como suele pasar en estos proyectos, los requisitos eran re utópicos:
- Tenía que hacer de todo.
- Tenía que costar dos mangos.
Y lo "peor" de todo: ¡tenía que ser de madera! Un robot de madera mil usos.
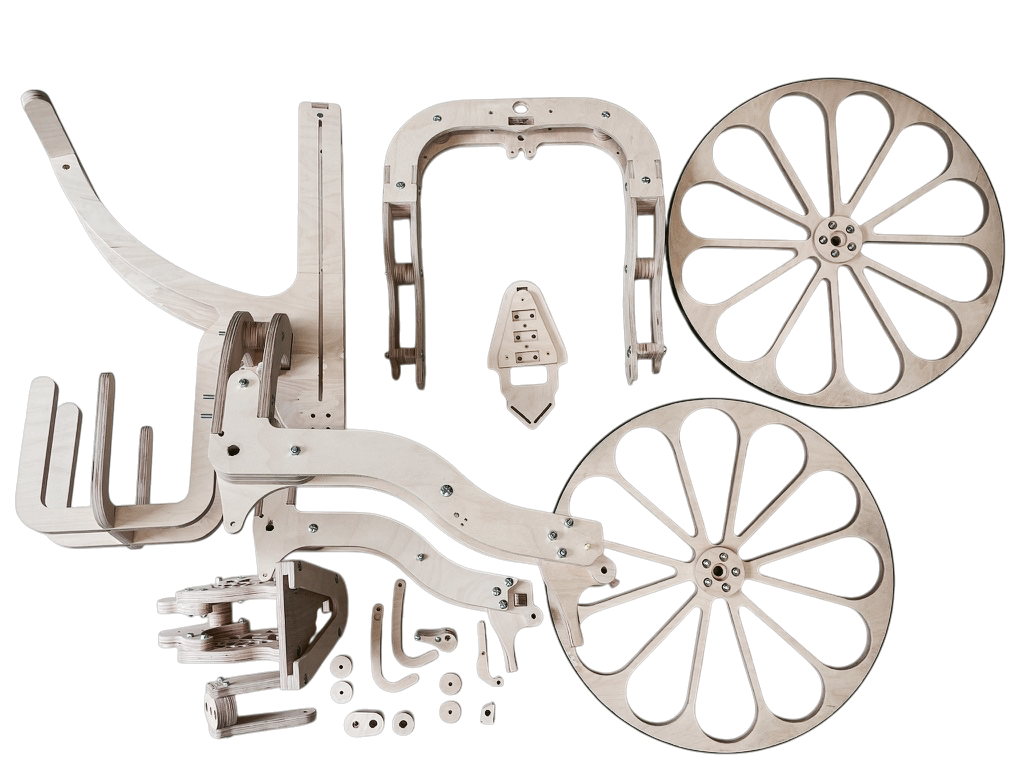
En Sudáfrica tienen unas máquinas CNC que cortan planchas de madera de distintos grosores con una precisión bárbara en la forma que quieras. Hoy en día, estas fresadoras CNC sencillas son bastante baratas o te las podés armar vos mismo con paciencia y tutoriales de internet. Diseñás el producto una vez en la compu con un software CAD y después lo fabricás todas las veces que quieras. Un golazo.
¿Por qué madera?
La solución obvia y más resistente, como tienen casi todos los aparatos, sería el metal o el aluminio. Es robusto, se puede mojar y te dura toda la vida. Pero ahí ya chocamos con los primeros problemas de fabricación. Tenés que saber trabajarlo, y muchas veces el personal local tiene una capacitación básica. Yo mismo, aunque en mi formación laburé mucho con metales, sufriría un montón para andar soldando, remachando y atornillando un bipedestador. El plástico, por su parte, también es complejo, no se consigue igual en todos lados y el moldeo por inyección para series chicas no te conviene para nada por los costos.
Así que al toque nos dimos cuenta de que tenía que ser de madera. En Timion ya la tenían re clara con la carpintería y la usaban para un montón de productos. A mí me pasó lo mismo en mi misión en el extranjero en India, donde también teníamos una pequeña carpintería que fabricaba elementos de asistencia para personas con discapacidad física. Además, la madera está volviendo a ser furor incluso en los hospitales suizos: tiene un tacto cálido, mejora la acústica, es agradable al tacto, genera un ambiente hermoso y es sustentable. Si el bipedestador termina tirado en la calle por ahí, no va a andar sumando microplásticos al planeta, sino que se va a biodegradar y los hongos chochos.
Otro criterio que fue clave para el diseño: el aparato tenía que entrar sí o sí en las casitas de chapa. Las casillas en Sudáfrica suelen ser re chicas y no hay espacio para nada. Si no entra, pasa lo que justamente queremos evitar: ¡el coso queda afuera, se moja y se termina arruinando! Así que, sumado a todas las exigencias delirantes que ya teníamos, el bipedestador tenía que ser plegable.
El proceso de diseño y los rituales creativos
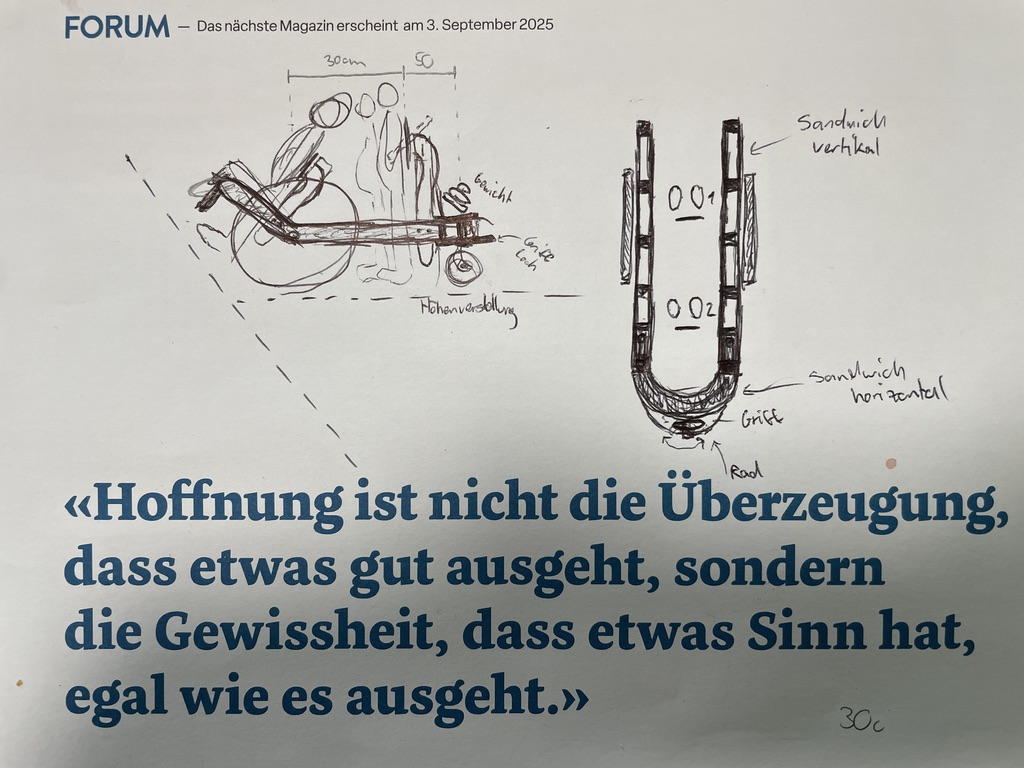
Así que me puse a estudiar el tema. Seis meses antes de viajar a Sudáfrica ya estaba dándole vueltas al asunto. Dibujé un montón de bocetos en papel, lo charlé con mis compañeros del equipo de robótica, con ingenieros y con la gente de Sudáfrica.
Necesitábamos ruedas grandes. Todos sabemos lo molesto que es empujar un changuito de supermercado cuando el piso tiene una pequeña junta o es de ripio. Un cochecito de bebé anda un poco mejor según el tamaño de las ruedas. Cuanto más grandes, mejor. Al final se me ocurrió usar ruedas de bicicletas infantiles. Pero ahí nos topamos con otro drama: en Sudáfrica se las roban. Sí, leíste bien. Se las roban incluso a un chico con discapacidad que no puede caminar. Hasta las rueditas tipo cochecito se las afanan si están "lindas". Una razón más para diseñar todo específicamente en madera: lo suficientemente resistente y liviano para un chico, pero no tanto como para aguantar cargas pesadas, no sea cosa que el entrenador de marcha termine convertido en una carretilla para llevar escombros.
El otro desafío era el peso. Para un nene chiquito al que ya le cuesta un montón moverse por sus propios medios, cada gramo cuenta. Por eso elegí una estructura tipo sándwich: dos maderas finas unidas por travesaños. Con estos refuerzos, un adulto se puede parar encima sin drama; sin ellos, la madera se quebraría al toque. Es una técnica parecida a la que usan en la ingeniería aeronáutica para ahorrar peso.
Así que viajé a Sudáfrica con un plan general, bocetos, un estudio de mercado (con una lista de todos los entrenadores de marcha del mercado), análisis de requisitos, un cronograma y una pequeña maqueta impresa en 3D. Me hospedé en un búngalo re lindo ahí mismo en el predio de la organización. Una belleza.
Allá me enamoré perdidamente del surf. Iba al mar casi todas las mañanas y tardes. Los delfines pasaban casi todos los días re cerca, hasta los podrías haber tocado si querías (yo la verdad no me animé). Ahí en el agua me sentía re conectado con los elementos, con la fuerza del mar, la naturaleza y conmigo mismo. Vivía muy el presente. A la noche caía rendido y dormía como un tronco.
¿Por qué te cuento todo esto? Porque aprendí que esos momentos son fundamentales para la creatividad. En Suiza solía estar metido al 100% en un proyecto, pensando en eso día y noche. Pero cuando surfeaba, éramos solo la ola y yo. Los delfines y yo. Mis amigos y yo. Nada de proyectos ni de andar dándole vueltas a la cabeza.
Teníamos otro ritual hermoso en el equipo: los lunes, miércoles y viernes cantábamos y bailábamos todos juntos. Una media hora cada mañana. A veces me emocionaba hasta las lágrimas y te aseguro que todo el mundo salía con una energía y una felicidad increíbles, aunque hubieras arrancado el lunes con una cara de dormido tremenda.
Estos dos rituales, el surf y el canto compartido, me enseñaron un montón sobre la inspiración. Volvía al laburo lleno de ideas y, a veces, las mejores soluciones aparecían solas cuando no las estaba buscando activamente.


El arte de prescindir y el mágico "clac"
Pero el mayor desafío del proceso de diseño llegó cuando armamos los primeros prototipos. Aunque fue, a la vez, lo que más disfruté: simplificar al máximo algo súper complejo.
La mayoría de los entrenadores de marcha comerciales se destacan por tener mil funciones y ajustes posibles. Esto hace que el aparato se vuelva tan complejo que solo un especialista lo puede configurar. Pasaba con el NF-Walker, el Trexo Robotics o el Lokomat. En Sudáfrica, en cambio, una mamá o una terapeuta de la zona tiene que poder adaptarle el andador al chico de forma súper simple y sin ayuda de nadie. Y, sobre todo, tiene que poder sujetar al nene en el entrenador de marcha ella sola.
Así que empecé a "tachar" cosas sin piedad. Me di cuenta al toque de que muchas funciones que se daban por sentadas no hacían falta o eran contraproducentes. Un claro ejemplo son las manijas de agarre. Aunque al paciente le dan sensación de seguridad, la evidencia científica y terapéutica demuestra que suelen ser malas para entrenar la marcha. Se aprende mejor y más rápido a caminar con las manos libres, porque de todos modos el tronco va bien sostenido y estabilizado por el arnés del aparato.
Lo mismo pasó con un montón de regulaciones que suelen traer estos equipos: la mayoría ni se usan, o se pueden evitar por completo con un diseño orgánico e inteligente.
Ahí surgió el siguiente reto: una sola persona tenía que poder sujetar al chico en el entrenador de marcha. Así que no podíamos atornillar el arnés de tela directamente al chasis rígido. Teníamos que hacer un arnés desmontable, con las correas para las piernas y los hombros. De esa forma, se le puede colocar el arnés al chico cómodamente mientras está acostado.
Para lograrlo, integramos una pequeña placa de madera directamente en el diseño del arnés. Esta plaquita se desliza de forma súper sencilla en una ranura del bipedestador. Un pestillo con resorte traba al chico en el andador automáticamente. Un "clac" fuerte te confirma que quedó bien asegurado, y con una palanquita destrabás el mecanismo para sacarlo cuando haga falta.
Creo que estos pequeños mecanismos de traba para sujetar al chico o para plegar el entrenador de marcha son de las cosas que más orgullo me dan. No solo porque hacen que usar el bipedestador sea mil veces más fácil, seguro y robusto, sino porque a todo el mundo que lo usó se le iluminaron los ojos con una mirada de asombro. Es difícil de explicar: te genera esa sorpresa de ver que el funcionamiento es tan simple. Una sensación de satisfacción enorme al escuchar ese sonido "clic" bien marcado. Como un cierre de cremallera que, tras diez intentos, logras encajar y luego se desliza suavemente, o como esos cierres magnéticos que simplemente se encuentran solos. Crear estos momentos de entusiasmo donde de repente todo se vuelve súper simple; para mí, eso es el buen diseño.
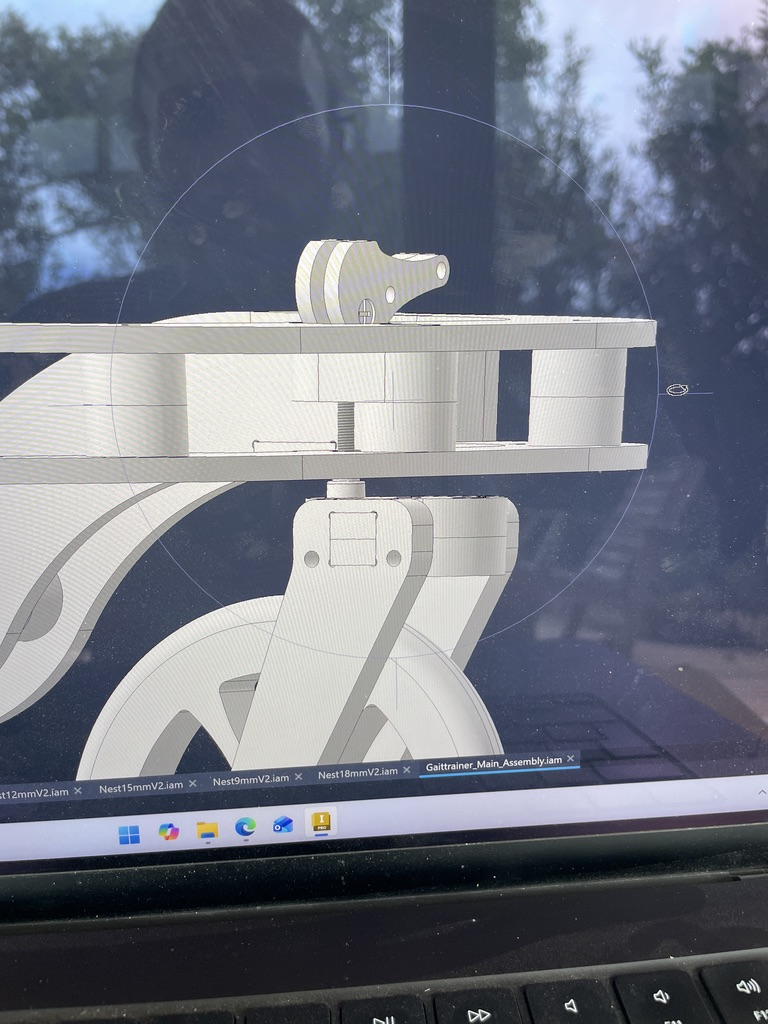
La altura se regula al toque con una sola mano usando un cierre rápido de bicicleta modificado, y queda firme como rulo de estatua. Así podés entrenar a cualquier chico de entre 2 y más de 10 años con un solo aparato. Y como ya sabemos que lo ideal es meterle con todo al entrenamiento hasta los 8 años, ¡necesitábamos una solución que cubriera toda esa ventana de tiempo!


Una parte del laburo que a veces se pasa por alto pero es crucial, es el diseño de la sujeción del cuerpo. Si esto falla, por más que la estructura sea perfecta, no sirve de nada. El sistema de arnés tiene que ser cómodo y adaptarse a distintos tamaños de cuerpo. En esto me sirvió muchísimo mi experiencia diseñando moldes y costuras para personas con discapacidad motriz, además de la elección de los materiales. Tras un montón de intentos, logramos un arnés abdominal que se puede ampliar de forma modular si hace falta. El molde definitivo lleva la placa de madera que te mencionaba cosida directo en la tela, que es la que se conecta firme con el sistema de traba.

Resumen de las innovaciones terapéuticas y económicas
Fuimos mejorando el entrenador de marcha paso a paso, prototipo a prototipo, probándolos directamente en las clínicas con chicos con PC. Así, en solo 5 meses logramos diseñar un entrenador de marcha listo para fabricar en serie y totalmente práctico para el día a día. A los papás, a los chicos y a los terapeutas les encantó. Muchos nos querían comprar los prototipos ahí nomás.

El entrenador de marcha tiene un montón de funciones que acá en Europa por lo general solo conseguís combinando varios aparatos distintos:
Transferencia intuitiva
Podés ponerle el arnés al chico mientras está acostado y después pasarlo al entrenador de marcha. Si querés plegar el entrenador de marcha, lo podés hacer sin esfuerzo físico. Además, las ruedas para la corrección de la marcha agachada (crouch gait) también se pueden rebatir hacia arriba con un solo clic.


Ergonomía evolutiva y todoterreno
Con un solo aparato podés hacer la terapia para chicos de distintas edades y tamaños. Además, gracias a las ruedas grandes, podés andar por terrenos desparejos sin ningún problema.
Control de marcha en tijera y guía recíproca de pasos
Con dos guías de piolín laterales podés evitar que el chico cruce los pies de forma patológica (marcha en tijera). Al mismo tiempo, este sistema mecánico de piolines que va desde los pies hacia adelante y de las rodillas hacia atrás controla la posición de las piernas: cada vez que el nene lleva un pie para atrás, el otro pie es guiado suavemente hacia adelante de forma automática.

Entrenamiento con soporte de peso corporal integrado
Este tipo de entrenamiento, que está re de moda en la investigación médica, alivia el peso de las piernas. Mientras que en los países desarrollados usan grúas robóticas carísimas colgadas del techo, nosotros logramos lo mismo volcando la rueda delantera hacia atrás. Después, ponés unas bolsitas de arena en el canasto trasero y, según cuánta ayuda necesite el chico, su peso se alivia de manera perfecta gracias al efecto palanca de la estructura.
Corrección de la marcha agachada (crouch gait)
Esta es una forma de caminar muy común en la que el chico nunca llega a estirar del todo las rodillas, manteniéndolas siempre un poco flexionadas. En mi diseño, al rebatir las ruedas hacia atrás, el aparato cuenta con unos apoyos tipo muletas integrados adelante que tocan el suelo si el chico no estira bien las piernas o si se quiere sentar a descansar. Gracias a estas "muletas", podés motivar al chico a caminar siempre con las piernas estiradas, porque si no, choca contra el piso y se frena.

Para hacer este mismo tipo de terapia en Suiza con todas estas funciones, por lo general necesitás por lo menos dos o tres aparatos distintos que tenés que andar cambiando cada un par de años. Eso equivale a decenas de miles de francos. En cambio, con mi diseño solo hace falta comprar un único entrenador de marcha, cuyos costos de material y fabricación no pasan de las tres cifras en francos.
La fundación Timion ya lo está fabricando en pequeñas series en Jeffreys Bay y se los vende, regala o presta a familias, terapeutas y hospitales. El bipedestador tiene un potencial enorme por su versatilidad, no solo para Sudáfrica, sino también para usarlo acá en Suiza o en cualquier rincón del mundo.
La visión: fabricación descentralizada en todo el mundo
En teoría, se podría fabricar el bipedestador en una gran fábrica, meterlo en un contenedor y que la gente lo arme en su casa como si fuera un mueble de IKEA. En parte ya se hace así, pero solo dentro de Sudáfrica.
La verdadera visión no es concentrar la producción al mango para mandar barcos cargados de aparatos por todo el planeta. Porque ahí volvemos a caer en el mismo problema: el andador va a estar disponible donde haya una buena logística, pero no les va a llegar a quienes más lo necesitan.
La idea es capacitar a la gente para que puedan armar una fresadora CNC de madera que sea barata. Así podemos compartirles los planos digitales de corte y poner el entrenador de marcha (junto con otros elementos como bandejas para sillas de ruedas, bipedestadores fijos, soportes para sentarse, sillas de baño adaptadas o mesas de terapia) a disposición de pequeños talleres locales en todo el mundo. Solo hace falta el archivo CAD digital, unas planchas de madera, una fresadora CNC y ya podés empezar a fabricar. No importa si estás en el interior de India o en una zona de guerra de difícil acceso. Daniel, de Timion, ya está en contacto estrecho con socios en India y Tanzania para hacer realidad esta visión y empezar a sumar los primeros aprendizajes de campo.

El futuro de la locomoción mecánica
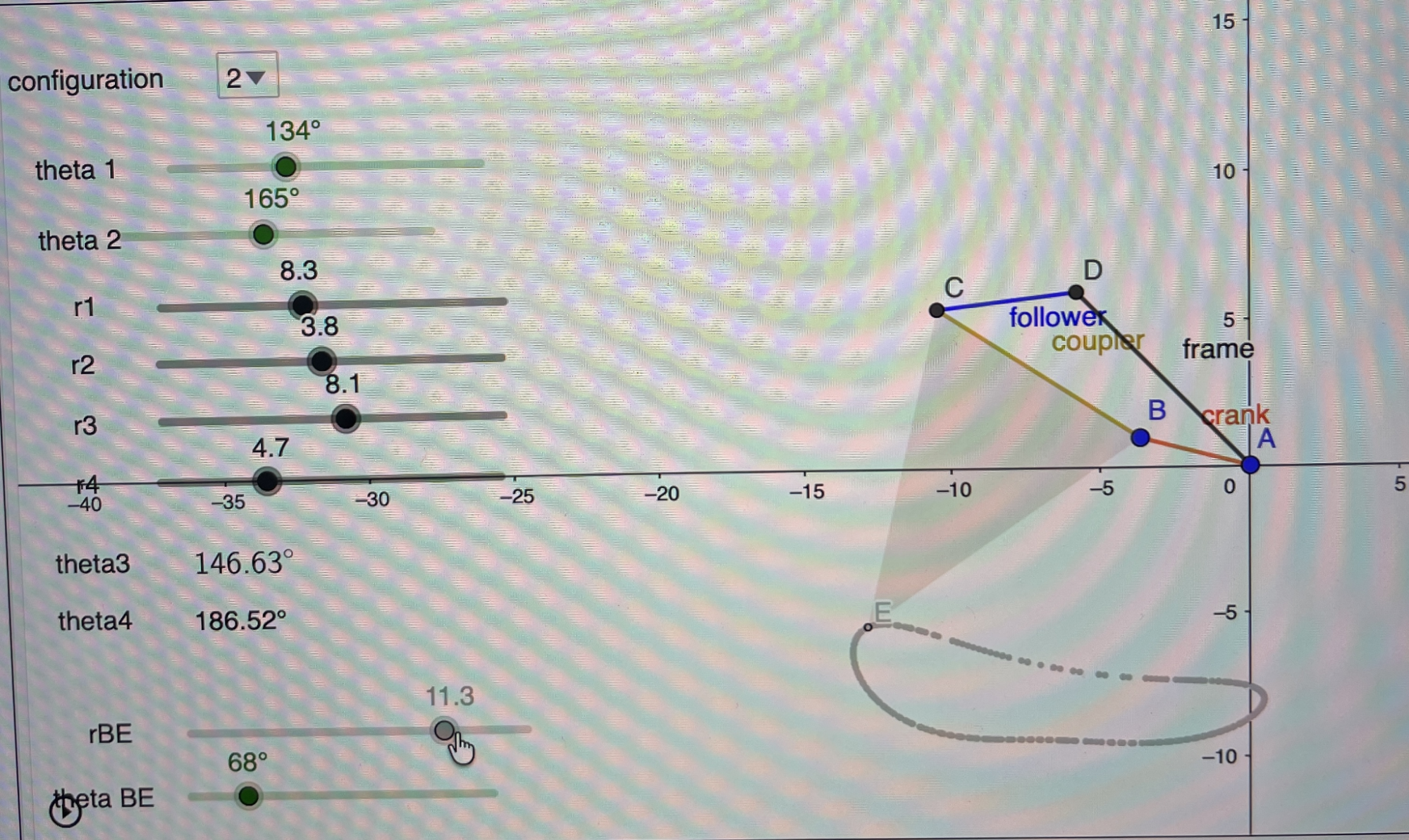
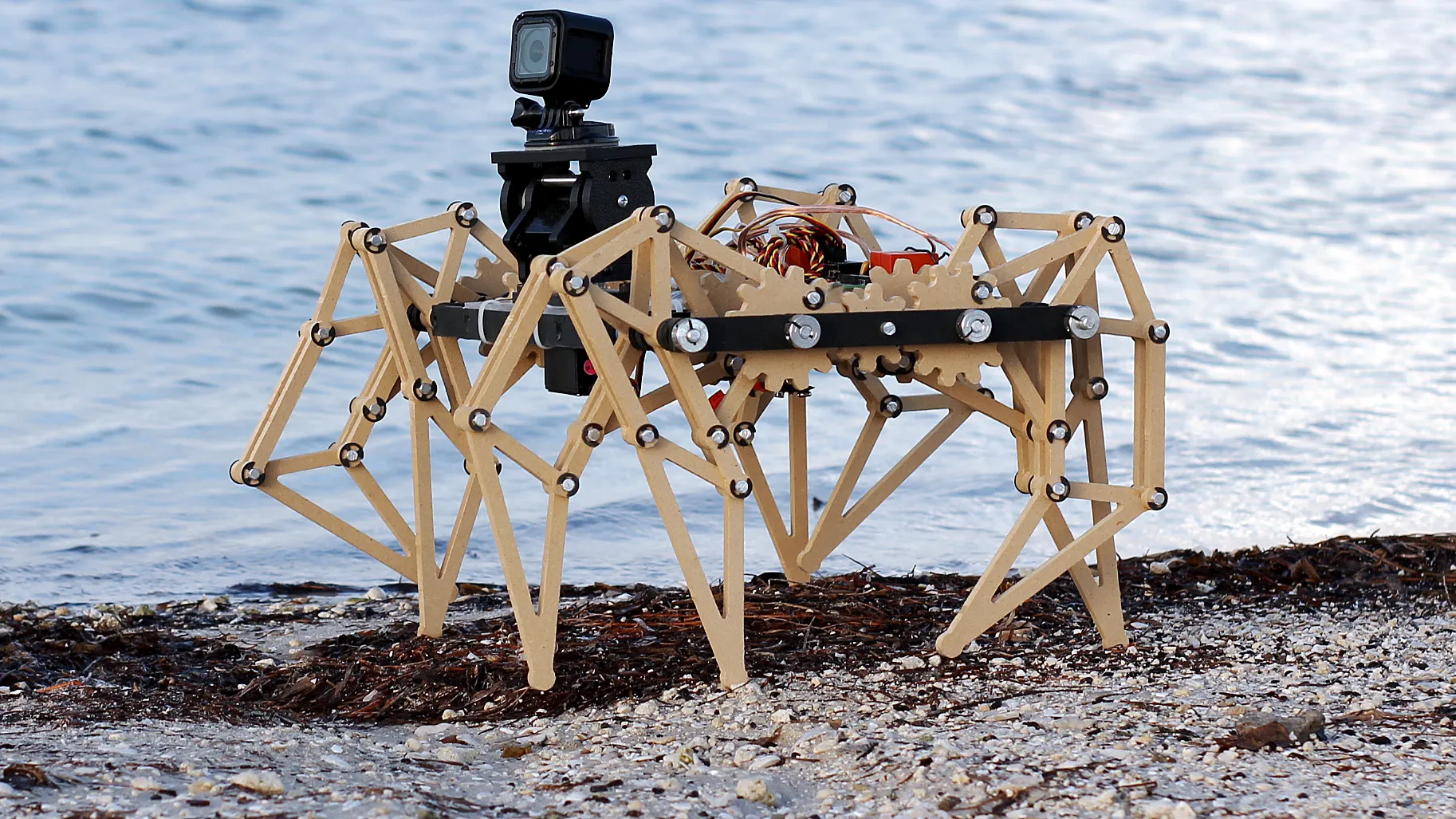
Además de armar esta red de talleres locales en todo el mundo, la próxima etapa de desarrollo ya está en marcha. Hacia el final de mi estadía, logré armar un primer prototipo de un módulo mecánico adicional que permite realizar una terapia de locomoción completa.
Es un sistema puramente mecánico que, al empujar el entrenador de marcha, guía los pies, las rodillas y las caderas de forma automática en un patrón de caminata perfecto. Me inspiré en los trabajos del artista holandés Theo Jansen y sus fascinantes "Strandbeests" (bestias de playa). De esta forma, en el futuro se podría rehabilitar incluso a chicos con parálisis total, de manera muy similar a como lo hacen los costosos robots acá en Suiza. Ese es el próximo paso. Lamentablemente, mi visa se venció antes de que pudiera dejar este diseño totalmente listo, seguro y robusto para el uso diario.




Newsletter
Recibe una carta cuando publique un nuevo artículo. Hago todo lo posible para no llenar tu bandeja de entrada con correo basura.
Sin spam. Date de baja en cualquier momento con un solo clic.
Discusión
0 comentarios