
Leonardo: A Pediatric Wooden Gait Trainer
How I radically simplified medical technology in South Africa to build a low-cost, all-terrain wooden gait trainer for children with cerebral palsy.

Globally, around 17 million people are affected by cerebral palsy. The immense neuroplasticity of the child's brain offers a critical window of opportunity until the age of eight to learn to walk. Western assistive devices are often unaffordable for affected families in the Global South, difficult to repair, and fail on uneven terrain. This is where my design comes in: the "Leonardo" gait trainer bridges the gap between high-cost Western medical technology and the harsh reality in developing regions.
At first, I was a bit torn as to whether I should even prepare this project as an application or a post. I am neither a trained designer nor a classic journalist. I am actually a computer scientist and orthopedic technician, but with an absolute love and passion for functional design. When a product designer friend of mine saw pictures and videos of my crazy "wooden cart", he immediately said I absolutely had to document and share this project. Therefore, I will now describe my project in great detail. The text may have turned out a bit long, but that is necessary to tell everything exactly as I experienced it. If you read through it, I am of course pleased, and otherwise feel free to just look at my pictures.
The Origin: From India to South Africa
The story of this project began a few years ago when a good friend of mine did volunteer work for an organization in South Africa. He made orthoses for poor children there. The sad thing is that almost no one there knows how to make orthoses properly. That is why his help and the passing on of his knowledge were desperately needed there. He spoke of the beautiful country, the dream beaches, dolphins, and the fact that Jeffreys Bay is also one of the best, if not the best place in the world for surfing.
I myself have also worked abroad in my job as an orthopedic technician. In India I manufactured prosthetics for children and experienced first-hand what the poor population has to struggle with. No one has the knowledge of how to manufacture a good assistive device. Assistive devices that do exist are difficult or impossible to import. If they can be imported, they are too expensive for the majority of the population anyway. Often, the assistive devices are not designed at all for local conditions. Suddenly, completely different factors matter, such as long durability, extremely low costs, usability on uneven terrain (not everything is perfectly concreted and wheelchair-accessible there), and they must be maintainable and repairable, even without trained specialists.

In Switzerland and the West, it is often exactly the opposite: money is no object, you need trained personnel who set up and adjust the assistive device every few weeks (when the child grows, for example), it is difficult or impossible to repair it yourself, you cannot move on uneven terrain, and you only receive the assistive device in a few countries anyway.
The Antithesis: High-Tech Research versus Everyday Usability
When I had the idea to go to South Africa, I was employed at the University of Applied Sciences in Rapperswil at the time. There, we were developing exactly such a high-tech assistive device. A highly complex robot that allows paralyzed people to walk. And only straight ahead, with a full battery, two people watching in case the thing tips over, inside covered buildings with flat floors and no obstacles. As you can imagine: not suitable for everyday use at all. But that is research. I think that is important, too. Because that is precisely where the products of the future are born. You think in new ways and make the unthinkable thinkable and tangible. Eventually, there is a solution to every problem. Mostly, at least.


Since I am a trained computer scientist, I was allowed to write software for the exoskeleton there. But I also learned a lot and gained valuable experience in product design. How to manufacture a medical device in a structured way. How to design electronic systems. How to test safely and weigh risks. And above all: how to take time for good design and a solid concept, systematically capturing ideas, evaluating them, and making the final decision on the best approaches.
The Target Group and Medical Necessity
So one day I called Daniel in South Africa. Together we brainstormed ideas for what kind of product I could develop for his charity, "Timion". It made sense that I could create a kind of low-tech exoskeleton there to help people learn to walk who cannot walk. We set the target group to children with cerebral palsy (CP).
Because there are very many of them there and all over the world, around 17 million people globally, and an above-average number in South Africa. With this condition, the child has too little oxygen in the brain at birth. As a result, entire areas of the brain literally die off. In some people, the symptoms are very mild, and if you speak with them, you might not even notice it. It varies extremely depending on the extent of the damage. But if you are unlucky, you cannot walk properly afterwards, suffer from paralysis, spasticity, and experience enormous difficulties in learning to walk during childhood in the first place. Most children therefore end up in a wheelchair for life.
But there is an important ray of hope. Something important that many do not even know!
Specifically, the child's brain has extreme neuroplasticity. This means: nerves in the brain can reconnect, adapt, and learn things that one can only learn poorly or not at all as an adult. This includes walking. Indeed, if you do daily training and regular physiotherapy with your paralyzed child, the chances are extremely good that the child will learn to walk through these new brain connections and can "walk through" the rest of their life instead of being in a wheelchair.
But as mentioned, regular training is absolutely essential for this! More precisely: every single day, ideally until the age of 8. After the age of 8, the plasticity of the brain decreases, and the goal of going through life without a wheelchair moves further and further away and eventually becomes impossible. But the cool thing is: you can learn it! Only everyone who has ever had children knows that beyond a certain age and weight, you can no longer hold the child up by the hips for hours. Especially not so low to the ground.
That is why we in Europe have a great number of assistive devices for this: complicated frames with wheels in which you can secure the child (after having had it adjusted by a professional), rollator-like aids for different body sizes, or robots like the Lokomat, with which the movement of the hip, knee, and ankle joints can be trained repetitively. All super good and effective for learning to walk. Often used in combination as well. Many families have three or more devices at once for one child that they use for therapy, and they receive new ones from insurance as soon as the child grows. Super good, but also very expensive, often not really user-friendly, and certainly not available to the poorer population of this world, neither in India nor in South Africa.



The Vision: A Jack-of-All-Trades Wooden Robot
So we decided to develop a gait trainer that would ideally solve everything at once: it should offer repetitive training like a robot, it should "grow" as the child gets bigger, it should offer effective and challenging training for children who already walk well, but also be suitable for children who can barely move or bear weight on their legs on their own. It should be extremely easy to use and adjust without requiring a specialist. And many functions correcting specific deformities of CP should be directly integrated, such as the crossing of the legs (scissors gait), the inability to stretch the legs (crouch gait), or clubfoot.
As with so many projects, the utopian requirements were:
- It must do everything.
- It must cost nothing.
And the "worst" of all: it also has to be made of wood! A jack-of-all-trades wooden robot.
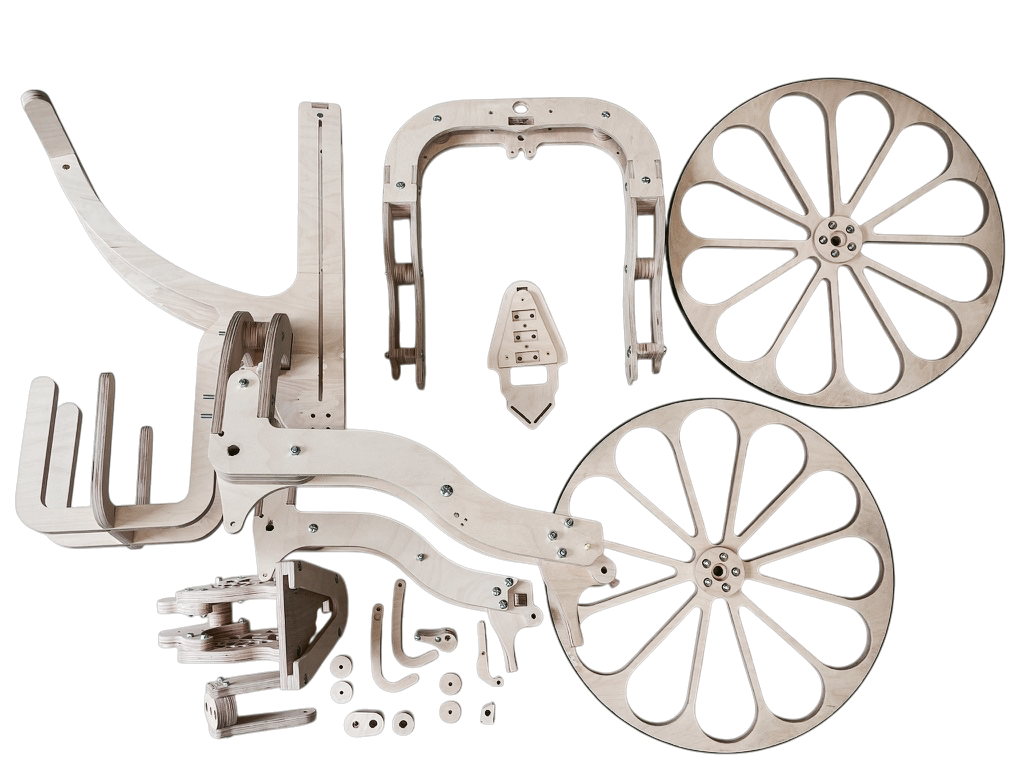
In South Africa, they have CNC machines that can precisely cut wooden boards of various thicknesses into any shape. By now, simple wood CNC machines can be bought quite cheaply or can even be built yourself with patience and online guides. You design the product once with CAD software on the computer and can then manufacture it as many times as you like. Perfect.
Why Wood, Anyway?
The most obvious best solution would be, as with almost all other assistive devices, metal or aluminum. Sturdy, can get wet, lasts forever. But the first problems already begin with manufacturing. You have to know how to manufacture it, often with only semi-trained personnel. I, at least, would have had a hard time welding, riveting, and screwing a gait trainer together, even though I worked with a lot of metal during my training. Plastic, on the other hand, is also complicated, not always available in the exact "same" way worldwide, and it is not cheap to injection-mold for small production runs either.
So it became clear relatively quickly: it had to be wood. Timion in South Africa is already highly experienced in woodworking and uses it for many products. The same was true for me in India, where we also had a small carpentry workshop that made assistive devices for people with physical disabilities. In addition, wood is even experiencing a revival in Swiss hospitals: it feels warm, provides good acoustics and haptics, creates a pleasant atmosphere, and is sustainable. So if the gait trainer is ever thrown onto the street somewhere, it won't add more microplastics to the world, but will simply rot away and make the fungi happy.
Another incredibly important criterion for the design: you absolutely must be able to take the device inside the small tin shacks. The shacks in South Africa are usually extremely cramped and have no space. If that is not possible, exactly what we do not want happens: the thing stays outside, gets wet, and eventually breaks down! So, in addition to all the other already crazy requirements, it absolutely had to fold.
The Design Process and Creative Rituals
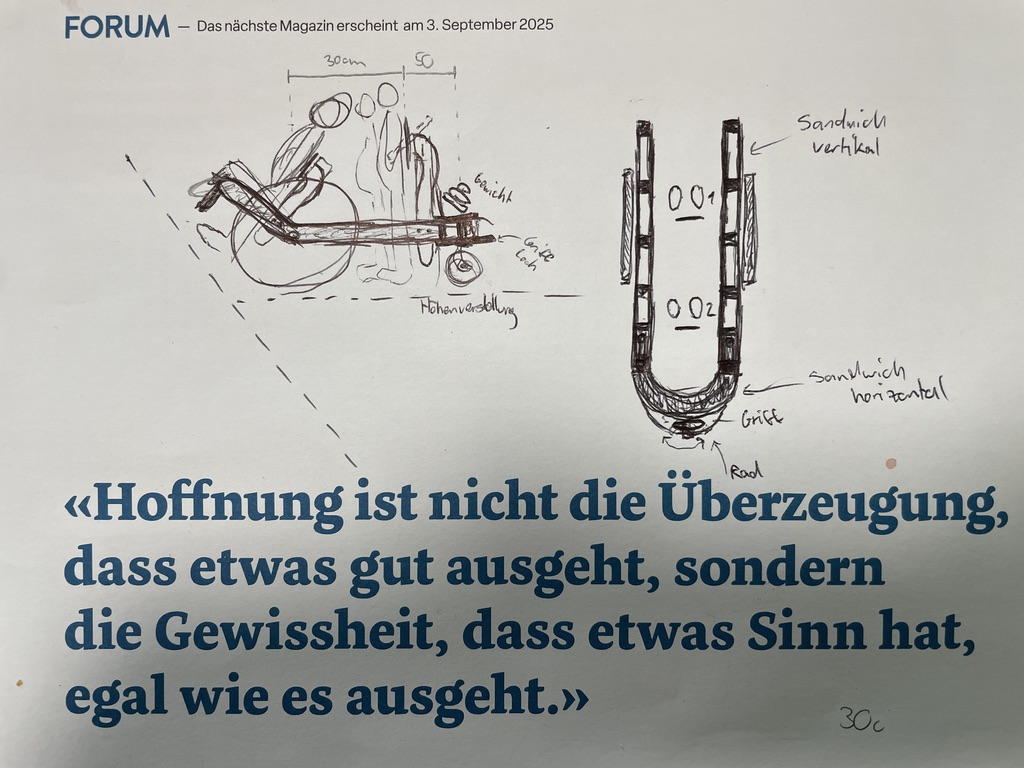
So I hit the books. Even half a year before my trip to South Africa, I was brainstorming. I sketched countless designs on paper, discussed them with my robot teammates, engineers, and the team in South Africa.
We needed large wheels. Everyone knows it: even a normal tiled floor with small ridges or a gravel path makes pushing a shopping cart a frustrating experience. A stroller is a bit better, depending on the wheel size. The larger, the better. I finally came up with the idea of simply using small children's bicycle wheels. But then we hit the next problem: they get stolen in South Africa. Yes, you heard that right. They get stolen even from a disabled child who cannot walk. Even small, stroller-sized wheels are stolen if they are "good". One more reason, therefore, to design the whole thing specifically out of wood: sturdy and light enough for a child, but too weak for heavy loads. Otherwise, the gait trainer might end up as a wheelbarrow for adults.
The next challenge was the weight. For a small child who can only walk with great difficulty under their own power, every single gram naturally makes a difference in how well they can move inside the device. That is why I chose a sandwich structure: two thin pieces of wood connected by struts. With struts, an adult can stand on it. Without struts, the wood would break immediately. A similar approach is used with sandwich structures in aerospace engineering to save weight.
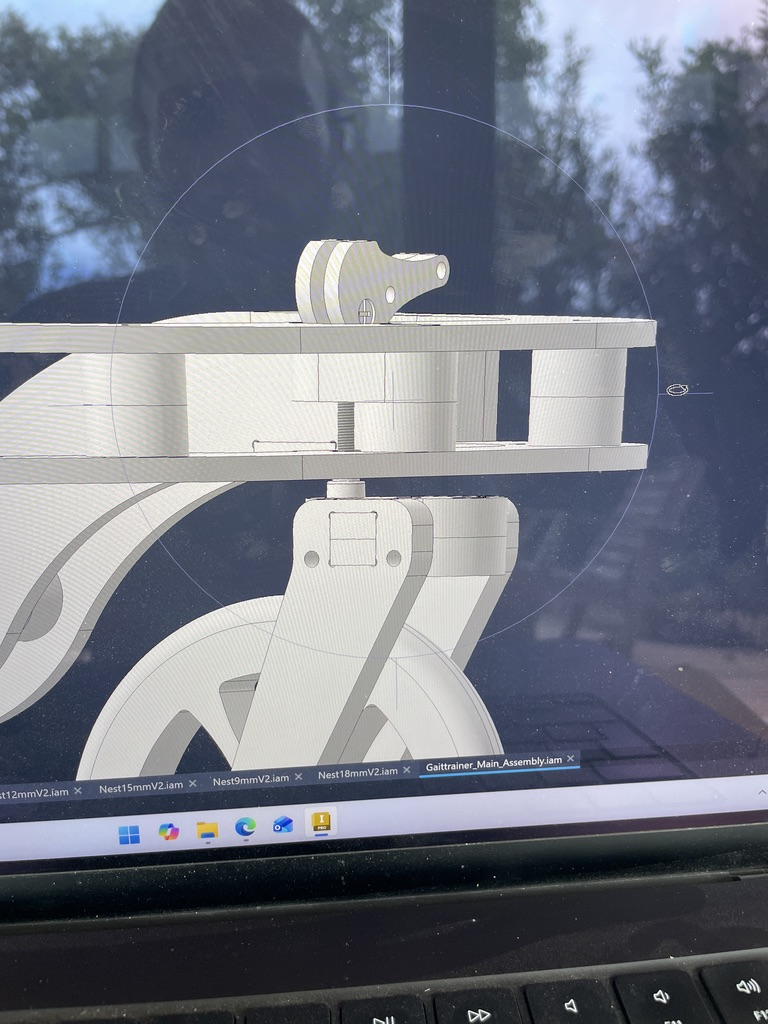
So I traveled to South Africa with a rough plan, sketches, market research (including a list of all relevant gait training devices on the market), requirement and utility analyses, a timeline, and a first small 3D-printed model. I was allowed to live in a small but nice bungalow directly on the company premises. It was beautiful.
I fell completely in love with surfing relatively quickly there. Almost every morning and every evening, I was out in the ocean. The dolphins swam by almost daily, and you could have touched them if you had wanted to (but I never dared to). Out there, I felt extremely connected to the elements, the power of the water, nature, and myself. I felt very present out there. I was tired in the evening and slept well.
Why do I mention all of this? Because I have learned that these moments are essential for one's own creativity. Before, in Switzerland, I was usually 100% busy with a project and thought about it day and night. While surfing, however, there was only me and the wave. Me and the dolphins. Me and my friends. No project. No overthinking.
We had a second such ritual that I would like to mention: every Monday, Wednesday, and Friday, we sang and danced together as a team. For about half an hour every morning. Sometimes I was moved to tears, and with an absolute guarantee of success, every single person on the team was full of euphoria and feelings of happiness afterwards, even if you might have come to work on Monday morning with a long face.
These two rituals, the surfing and the singing together, have taught me a great deal about creativity and inspiration. I was always full of inspiration and good ideas afterwards, and sometimes the best solutions simply popped up when I wasn't even looking for them directly.


The Art of Omission and the Magic "Click"
But then came the biggest challenge in the design process, as soon as we had built the first prototypes. Yet, it was also precisely the challenge that I enjoyed the most: making something highly complex as simple as possible.
Because all existing gait trainers usually shine with a huge number of functions and adjustment options. This inevitably leads to a very complex device that, de facto, can only be adjusted by a trained specialist. Some examples of this are the NF-Walker, Trexo Robotics, or the Lokomat. In South Africa, however, a mother or a local therapist must also be able to adjust the device to the child very easily and without assistance. And above all, she must be able to secure the child in the gait trainer completely on her own, without help.
So I began systematically "crossing off" features. I realized relatively quickly that many features that were considered "normal" were often not needed at all or were even counterproductive. A good example of this is hand grips. Although they give the patient a sense of security, according to therapeutic and scientific evidence, they are often bad for gait training. You learn to walk better and faster when your hands are free, since you are caught and stabilized in the device via your torso anyway. The same applied to countless adjustment options that such devices often have, most of which are never actually adjusted anyway, or are completely avoidable with a smart, organic design.
Then came the next problem: a single person should be able to secure the child in the gait trainer alone. You cannot, therefore, screw the fabric hip belt directly to the rigid frame. The hip belt had to be made removable, along with the leg and shoulder straps. This way, you can put the strap system on the child comfortably while they are lying down.
For this, a small wooden board was integrated directly into the pattern of the hip belt. This wooden board could then easily be "slid" into a slot on the gait trainer. A small spring-loaded latch then locks the child in place on the gait trainer without you having to do anything yourself. A loud "click" confirms that it is securely locked, and a small lever allows you to release the mechanism to take the child out again.
I think these small, simple locking mechanisms for clicking the child in place or folding the gait trainer are something I am most proud of. Not only because they make using the gait trainer so much easier, safer, and more robust, but because they triggered that bewildered, amazed look in the eyes of absolutely everyone who used them. It is hard to describe; it brings people this sense of surprise that this is really all that needs to be done. A feeling of wonder, of satisfaction at the loud and strong "click" sound. Like a zipper that you finally manage to thread after the tenth attempt and then closes smoothly, or like those magnetic clasps that simply find each other on their own. Creating these moments of enthusiasm where everything suddenly becomes totally simple—that, for me, is great design.
The height can be adjusted very easily by adjusting a modified bicycle wheel quick-release skewer with just one hand, locking infinitely and rock-solidly. This way, you can train any child from 2 to over 10 years old with just one single device. As we know, ideally you should train "full throttle" until the age of 8. So we needed a solution that covers this entire time window!


An often underestimated, but essentially important part of the work was the design of the body harness. If this fails, the best mechanical construction is useless. The harness system must be comfortable and cover a wide range of different body sizes. Here, my extensive experience in sewing pattern design for physically disabled people as well as in material selection helped me. The result of numerous iterations is a hip support that can be modularly expanded as needed. The final pattern integrates the aforementioned wooden board directly into the fabric, which establishes the stable connection to the locking mechanism.

An Overview of Therapeutic and Economic Innovations
We improved the gait trainer step-by-step, prototype-by-prototype, and always tested it directly in clinics with children with CP. This way, in just 5 months, we were able to design a gait trainer that is fully ready for production and absolutely suitable for everyday use. The parents, the children, and the therapists loved it. Many already wanted to buy our prototypes directly.

Indeed, the gait trainer has an astonishing number of features that we in Europe usually only get in combination with several different devices:
Intuitive Transfer
You can secure the child in the harness system while they are lying down, and then transfer them into the gait trainer. If you want to fold up the gait trainer, you can do this without any physical effort. And the wheels for the anti-crouch gait training can also be folded up with a single click.


Ergonomics that Grow with the Child & All-Terrain Usability
You can treat all childhood ages and sizes with just one gait trainer. In addition, thanks to the large wheels, you can effortlessly drive over uneven terrain.
Anti-Scissors Gait & Reciprocal Gait Control
You can prevent the feet from pathologically crossing with two lateral cord guides (anti-scissors gait). At the same time, this mechanical cord guidance from the feet to the front and the knees to the back controls the position of the legs: every time the child moves backward with one foot, the other foot is automatically guided forward gently.

Integrated Body-Weight Support (BWS) Training
This training, highly "hyped" in health research, unloads body weight. While Western clinics use expensive robotic ceiling lifts for this, we do the same thing by folding the front wheel backward. After that, you pack small sandbags into the basket at the back, and depending on the need for support, the child's weight can be perfectly unloaded through mechanical leverage.
Crouch Gait Correction
This is a very common gait pattern where the child never fully extends the knees and always keeps them slightly bent. When you fold the wheels backward in my design, it has small integrated crutches with crutch tips at the front that touch the ground if the child does not extend their legs nicely or wants to rest. Through these "crutches," you can actively force the child to always walk with extended legs, because otherwise they will hit the ground with the crutches and get stuck.

If you wanted to perform exactly the same type of therapy with these functions in Switzerland, you would typically need at least two to three different devices that have to be bought new every few years. This corresponds to tens of thousands of francs. With my design, however, you only need to purchase a single gait trainer, whose material and production costs are in the three-digit Swiss franc range.
It is already being manufactured in small series by the Timion organization in Jeffreys Bay and sold, donated, and loaned to families, therapists, and hospitals. The gait trainer offers potential because of its versatile applications, not only in South Africa but absolutely also here in Switzerland or other countries around the world.
The Vision: Decentralized Manufacturing Worldwide
Theoretically, the gait trainer could be manufactured in a large factory, shipped, and customers could then screw it together at home like IKEA furniture. This is already being done to some extent, but so far only within South Africa.
But the true vision is not for us to ramp up centralized production to the absolute maximum and then ship the devices all over the world. Because then we have exactly the same problem again: the gait trainer is available where there is a good logistical structure, but once again not to the people who need it most.
Rather, the vision is that we train people in how to set up a cheap CNC wood milling machine. This way, we can share the digital cutting plans with them and make the gait trainer and other assistive devices, such as wheelchair trays, standing aids, seating systems, adaptive toilet chairs, or therapy tables, available to small local production workshops around the world. So all you need is the digital CAD file, a few wooden boards, and a CNC mill, and you can get started right away. No matter whether you are in rural India or in a difficult-to-access conflict zone. Daniel from Timion is already in close exchange with partners in India and Tanzania to realize this vision and gather first real learnings.

Outlook: The Future of Mechanical Locomotion
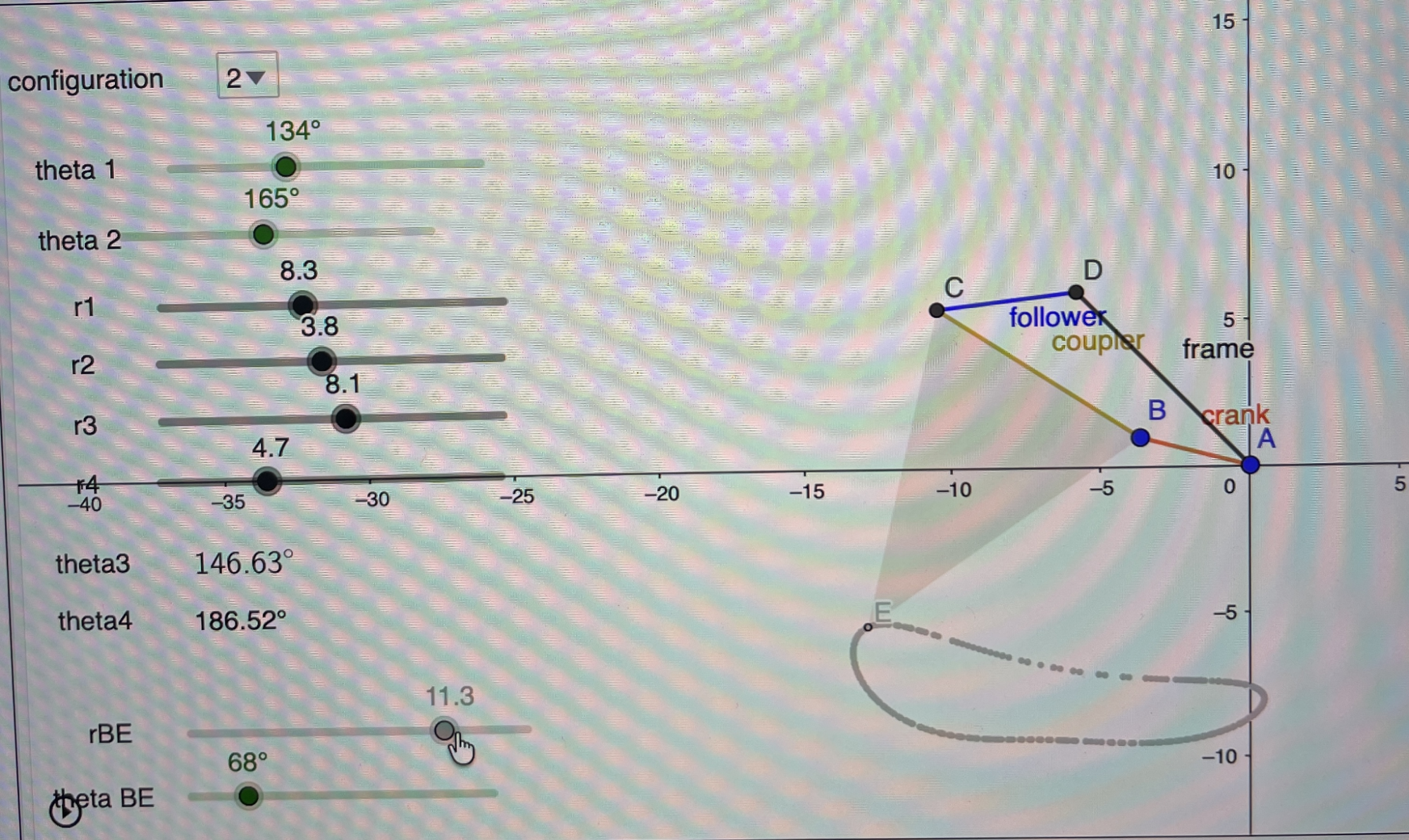
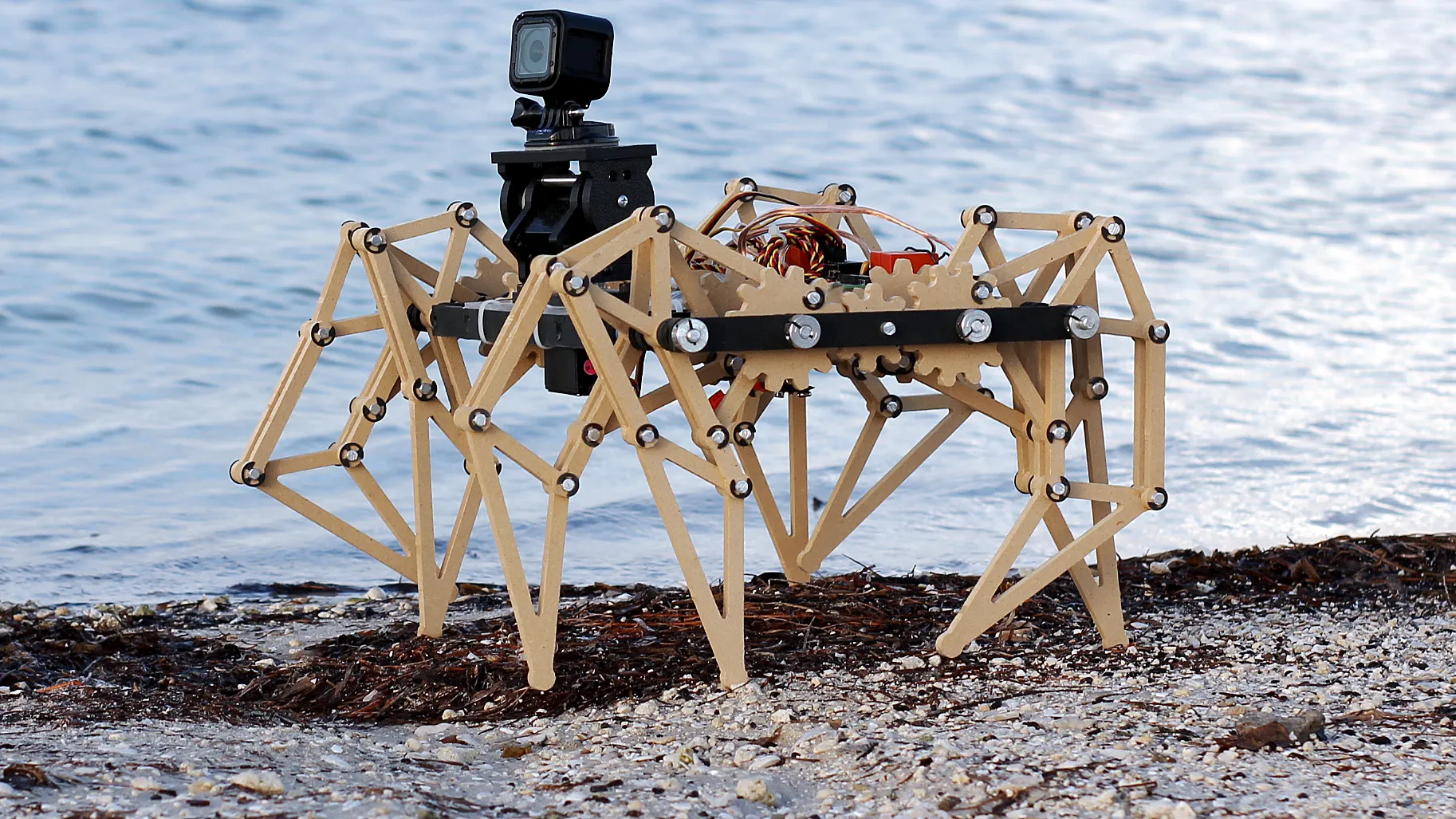
In addition to setting up local workshops worldwide, the next stage of development is already in the pipeline. Finally, I was able to build a first prototype of a mechanical add-on module that allows for complete locomotion therapy.
It is a purely mechanical system that, when the gait trainer is pushed, automatically guides the feet, knees, and hips in a perfect "walking movement". Inspired by the Dutch artist Theo Jansen and his fascinating "Strandbeests". This way, even completely paralyzed children could be treated in the future, similar to what complex robots do here in Switzerland. This is next in the pipeline. Unfortunately, my visa expired before I could make this specific design completely suitable for everyday use, robust, and safe.




Newsletter
Receive a letter when I publish a new article. I do my best not to clutter your inbox with unnecessary junk.
No spam. Unsubscribe at any time with a single click.
Discussion
0 comments